|
|
Wechseln Sie zur Seite in englischer Sprache
|

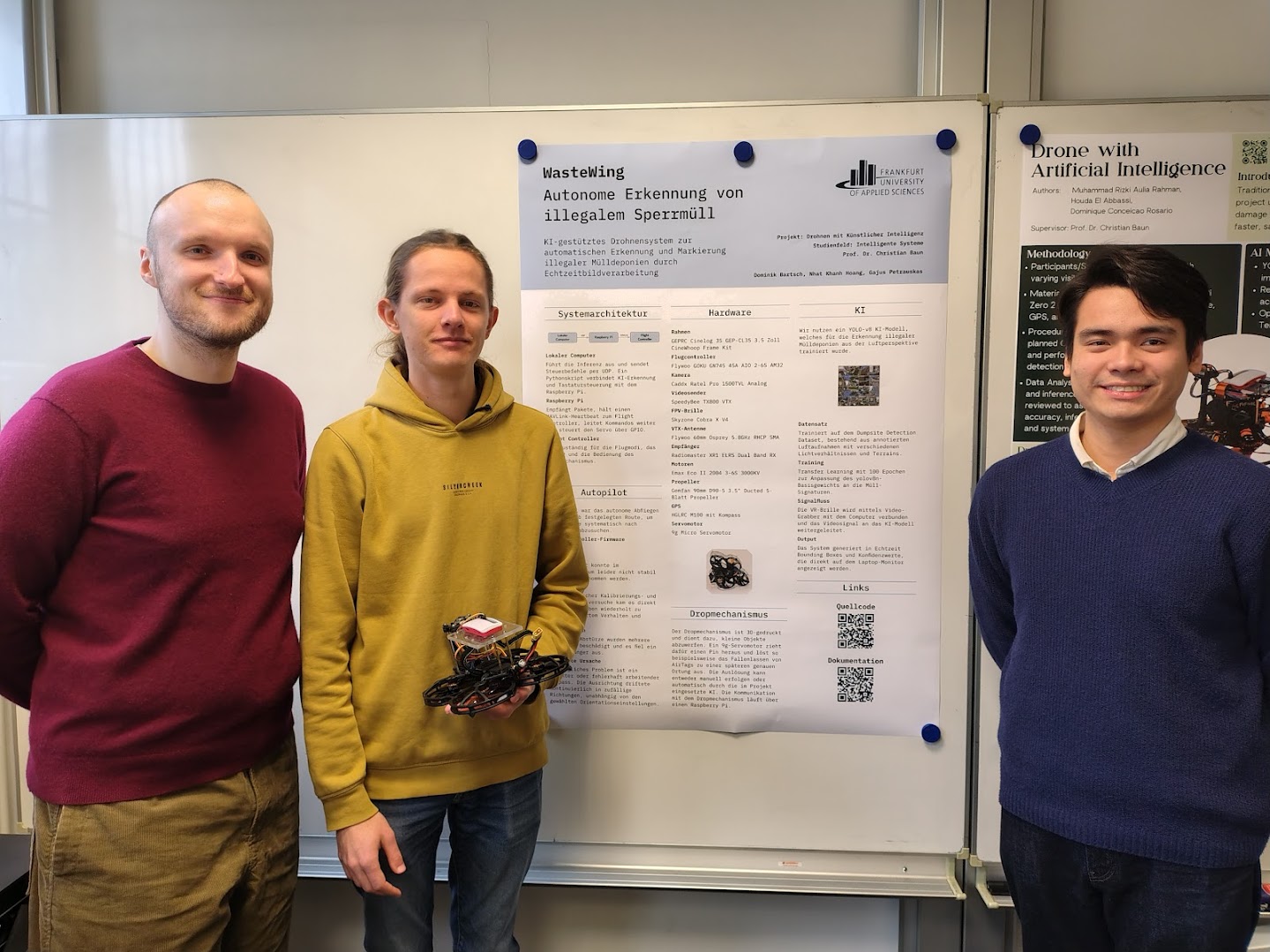
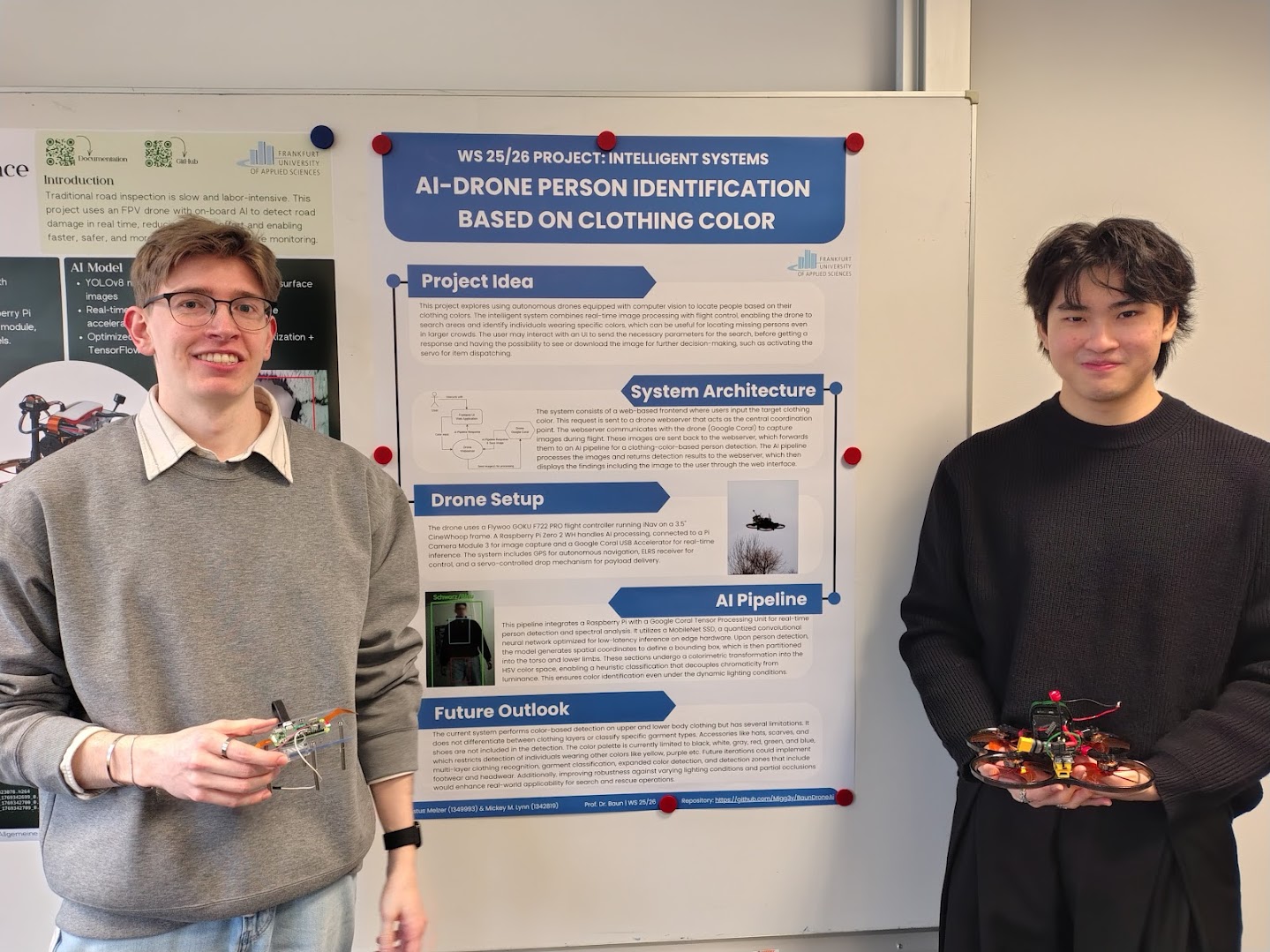
Teilnehmerinnen und Teilnehmer des Projekts bilden Gruppen aus maximal vier Personen. Jede Gruppe bekommt eine KI-fähige FPV-Drohne und die nötigen Komponenten gestellt. Ihre Aufgaben sind die Entwicklung, Implementierung, Untersuchung und Bewertung von spannenden und gut nachvollziehbaren Drohnen-KI-Anwendungen.
| Datum | Zeit | Raum | Inhalte |
|---|---|---|---|
| 15.10.2025 | 10:00-13:00 | 2-033 | Einführungsveranstaltung, Gruppenfindung, Anforderungsanalyse, Projektplanung (Zeitplanung) |
| 22.10.2025 | 10:00-13:00 | 2-033 | Gruppenarbeit |
| 29.10.2025 | 10:00-13:00 | 10-MZH, 2-033 | Flugtests in der Mehrzweckhalle, Gruppenarbeit im Labor |
| 05.11.2025 | 10:15-13:00 | 10-MZH, [1-022|2-033] | Flugtests in der Mehrzweckhalle, Gruppenarbeit im Labor |
| 12.11.2025 | 10:00-13:00 | 10-MZH, 2-033 | Flugtests in der Mehrzweckhalle, Gruppenarbeit im Labor |
| 19.11.2025 | 10:00-13:00 | 10-MZH, 2-033 | Flugtests in der Mehrzweckhalle, Gruppenarbeit im Labor |
| 26.11.2025 | ----- | ----- | U!REKA Day |
| 03.12.2025 | ----- | ----- | Dienstreise |
| 10.12.2025 | 10:00-13:00 | 10-MZH, 2-033 | Flugtests in der Mehrzweckhalle, Gruppenarbeit im Labor |
| 17.12.2025 | 10:00-13:00 | 10-MZH, 2-033 | Flugtests in der Mehrzweckhalle, Gruppenarbeit im Labor |
| 24.12.2025 | ----- | ----- | Weihnachtsferien |
| 31.12.2025 | ----- | ----- | Silvester |
| 07.01.2026 | 10:00-13:00 | 10-MZH, 2-033 | Flugtests in der Mehrzweckhalle, Gruppenarbeit im Labor |
| 14.01.2026 | 10:00-13:00 | 10-MZH, 2-033 | Flugtests in der Mehrzweckhalle, Gruppenarbeit im Labor |
| 21.01.2026 | 10:00-13:00 | 10-MZH, 2-033 | Flugtests in der Mehrzweckhalle, Gruppenarbeit im Labor |
| 28.01.2026 | 10:00-13:00 | 2-033 | Demonstration und Präsentation der Projektergebnisse aller Teams, Abschlussveranstaltung |
| KI-Drohnen: Ein zweisprachiges Handbuch über Entwurf, Bau und Einsatz von KI-fähigen Drohnen für wissenschaftliche Projekte und Lehre (Stand: 16.11.2025) | ||
| Projektbeschreibung | ||
| Project description |
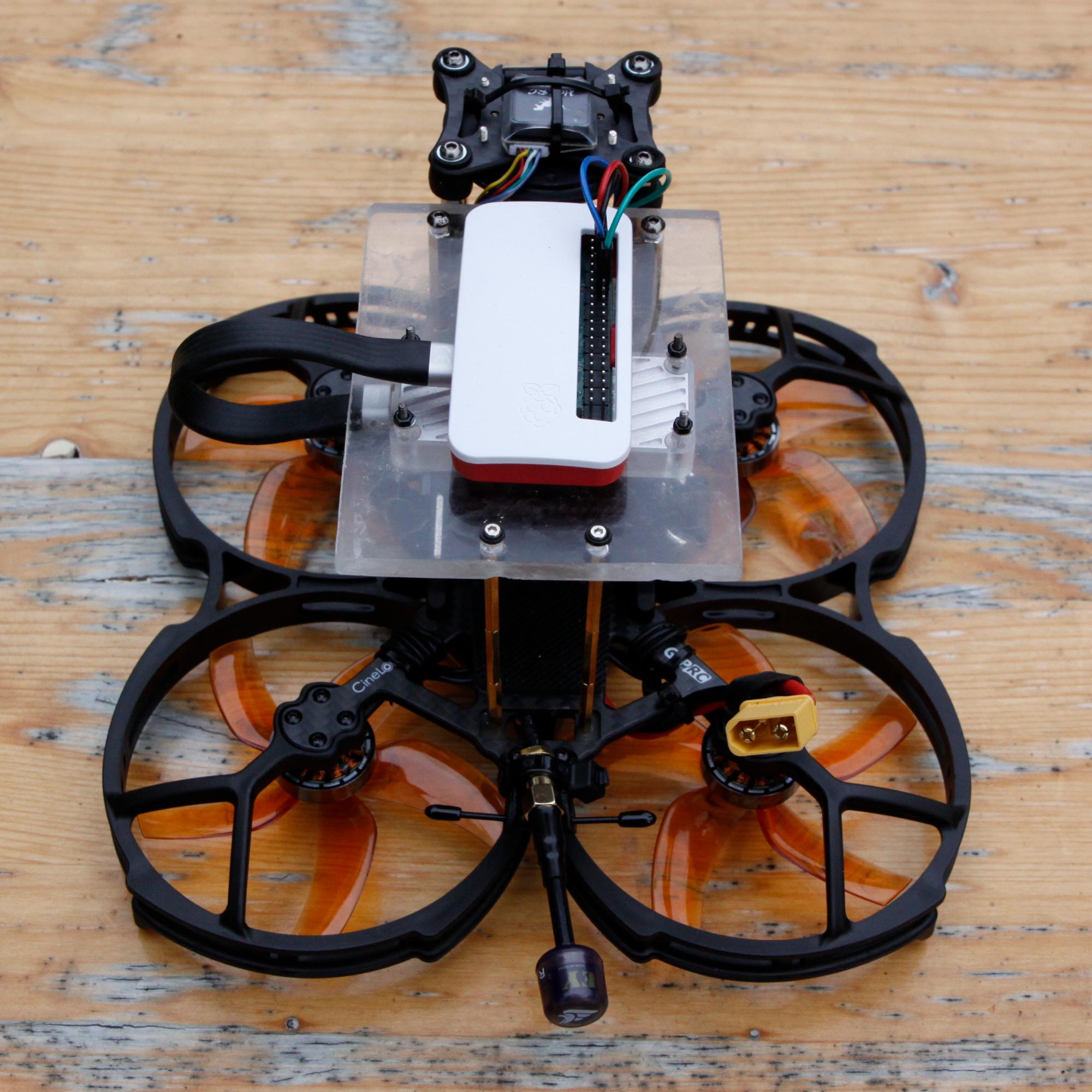
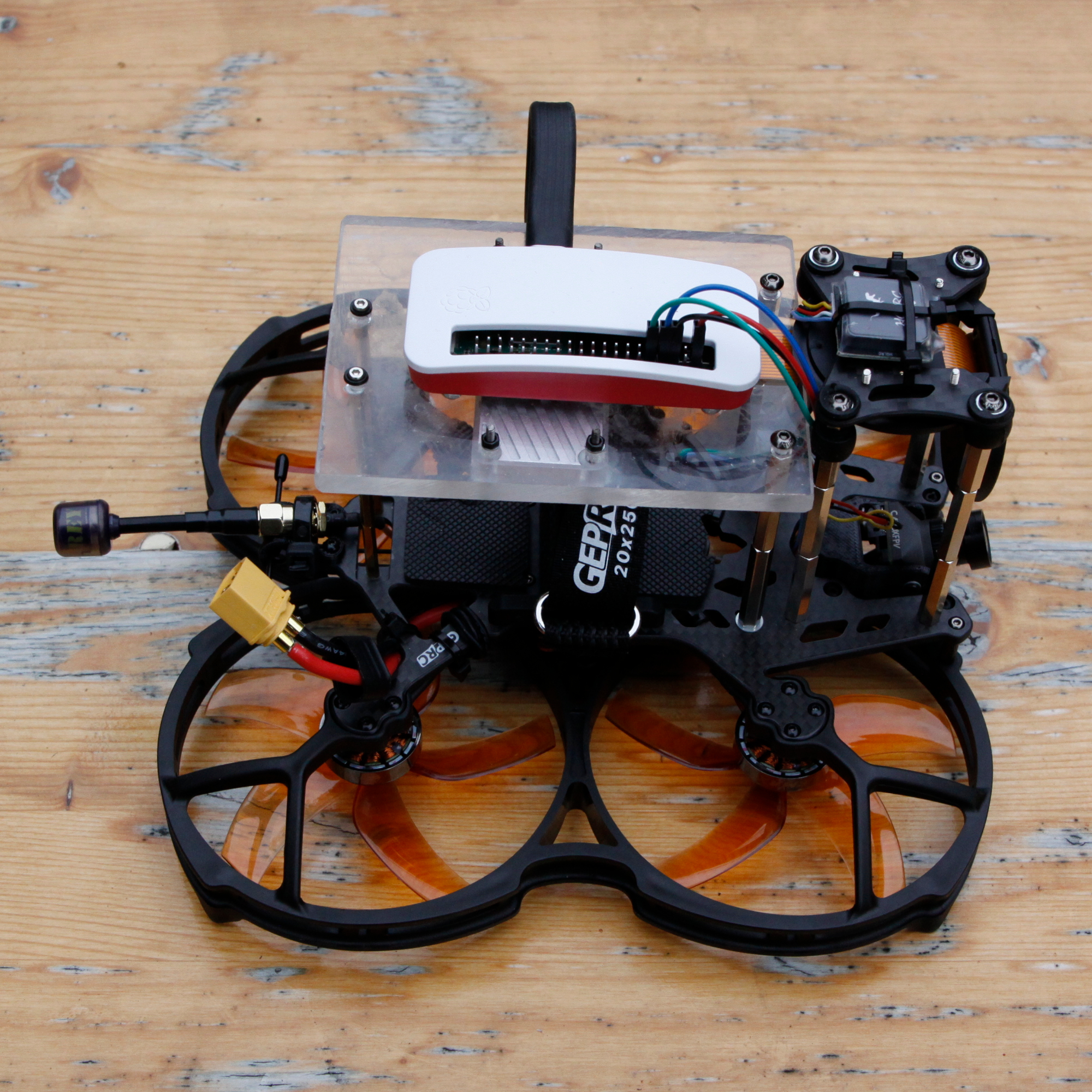
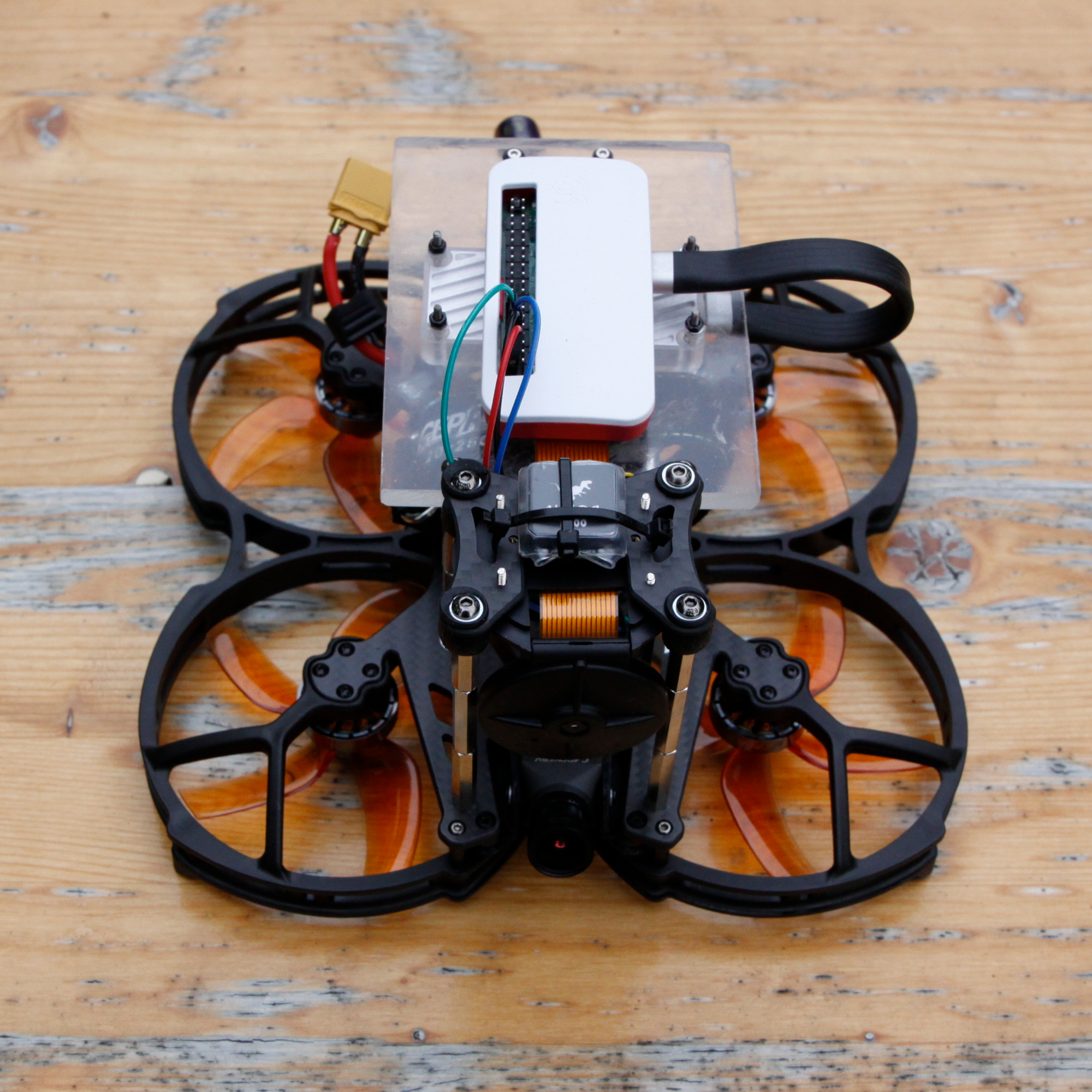
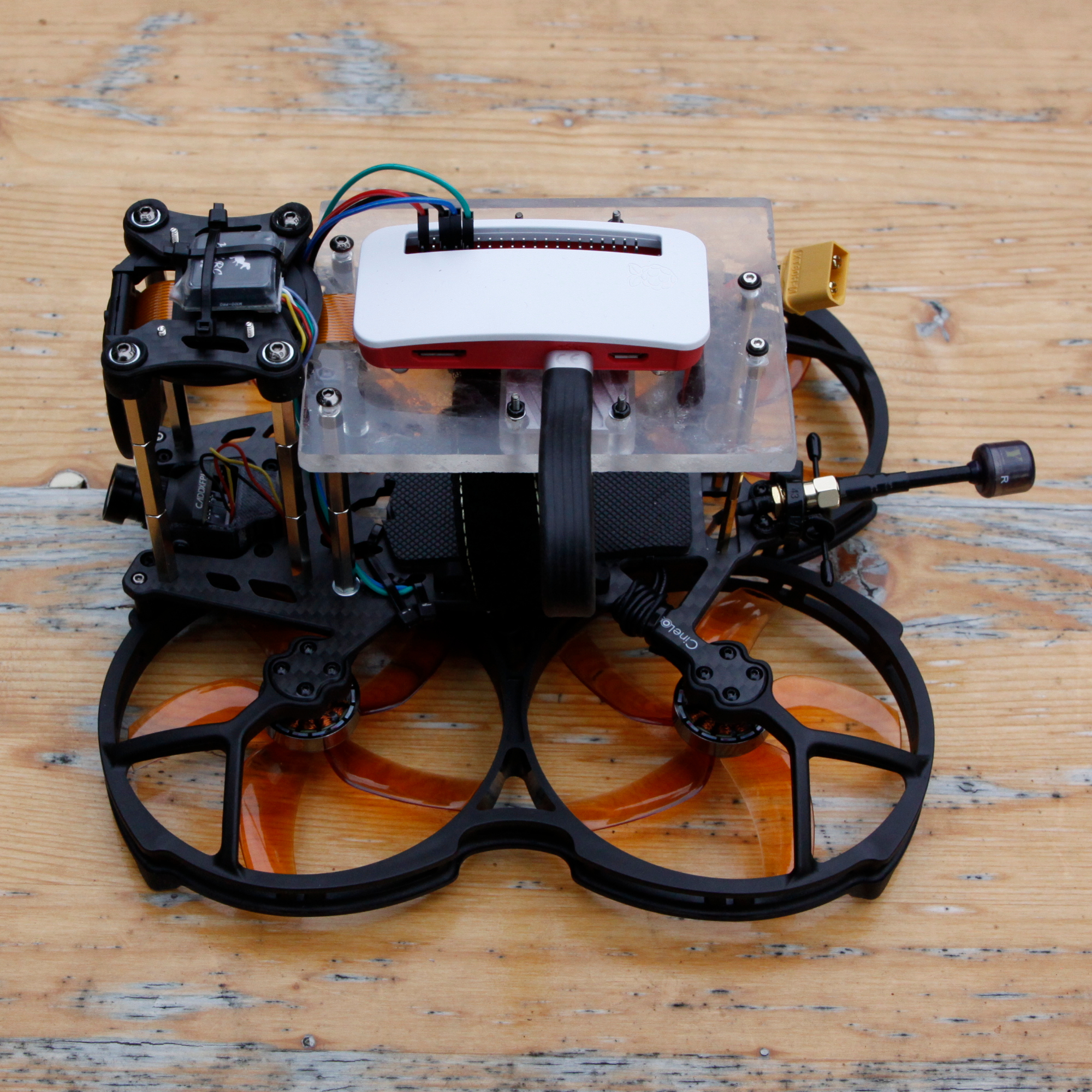
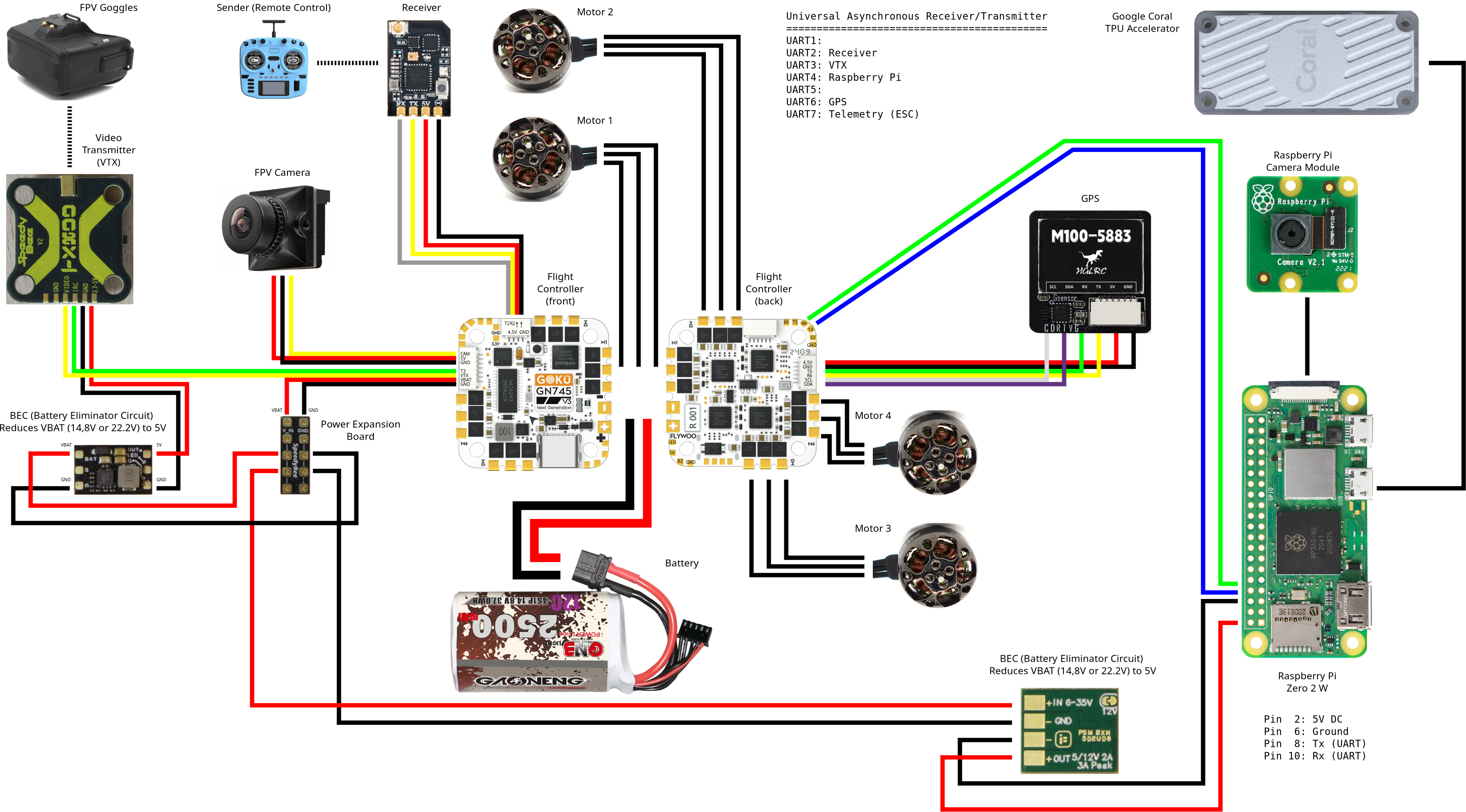
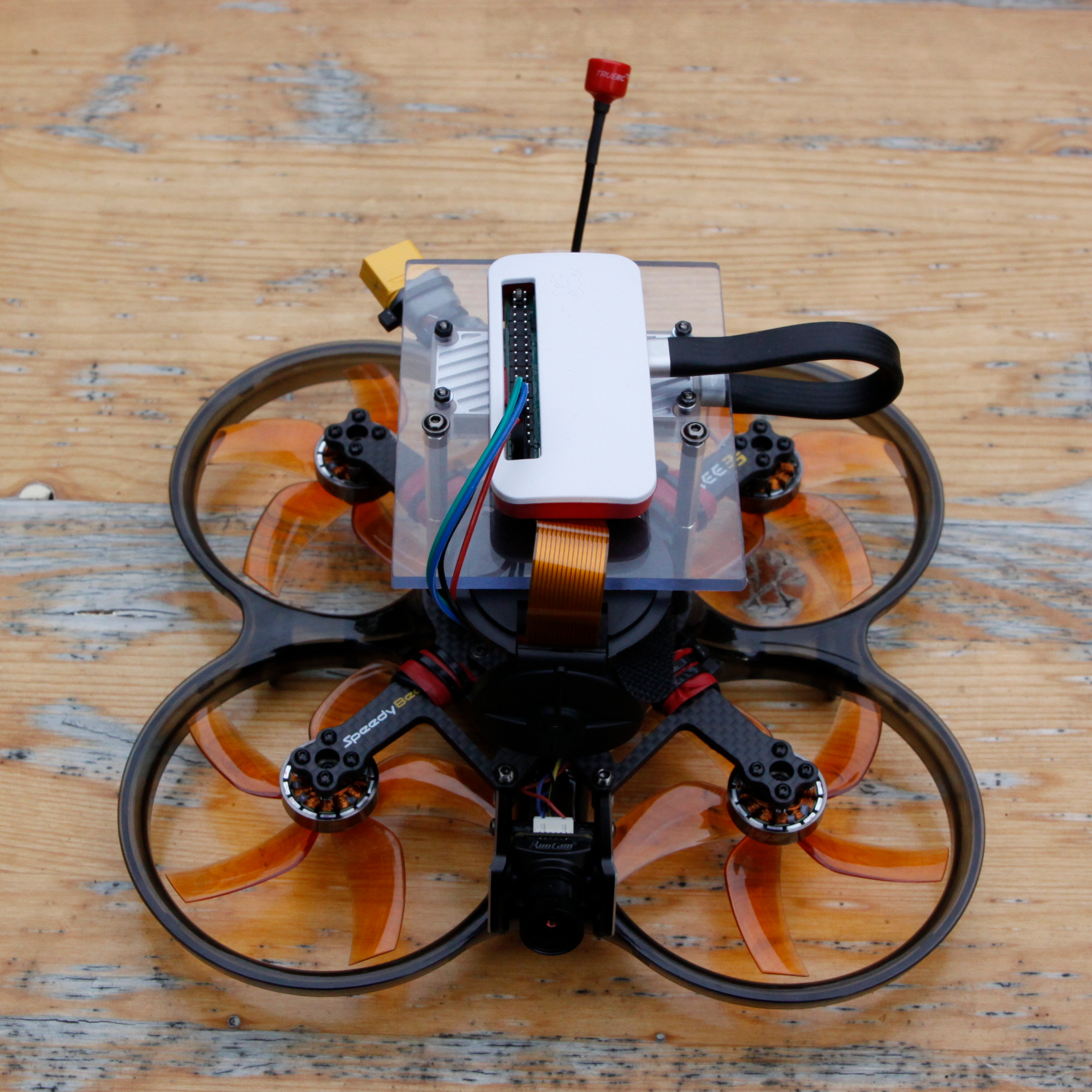
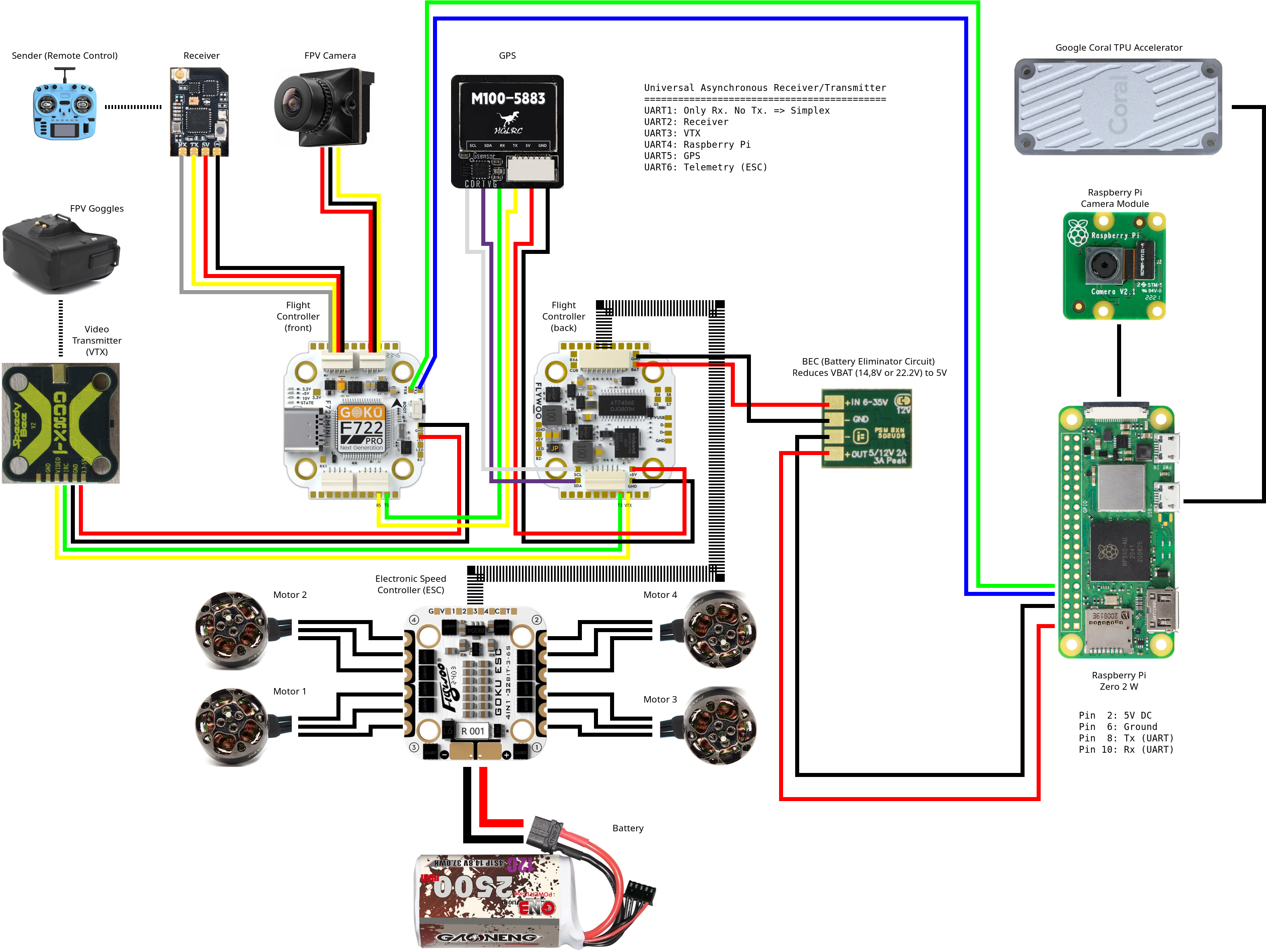
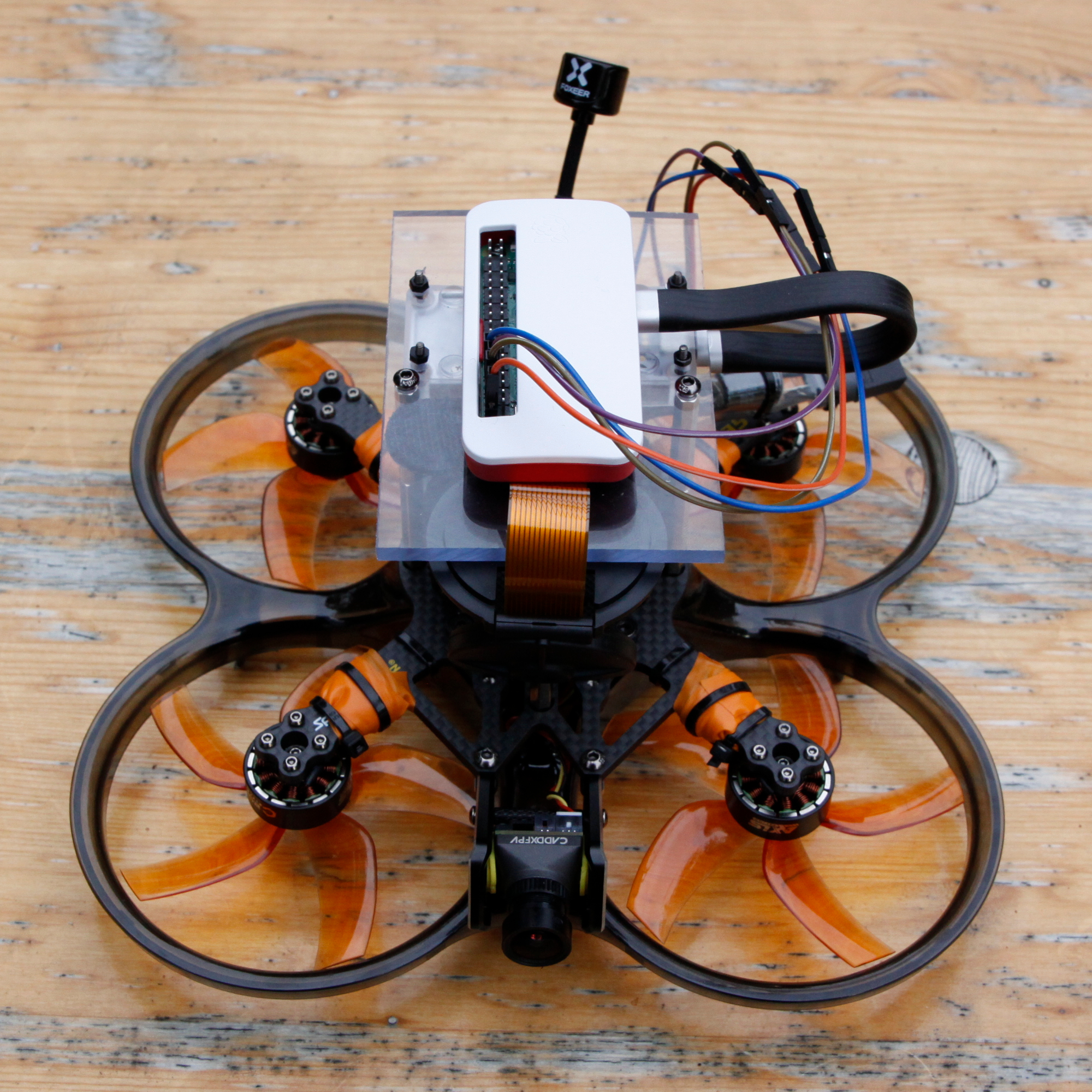
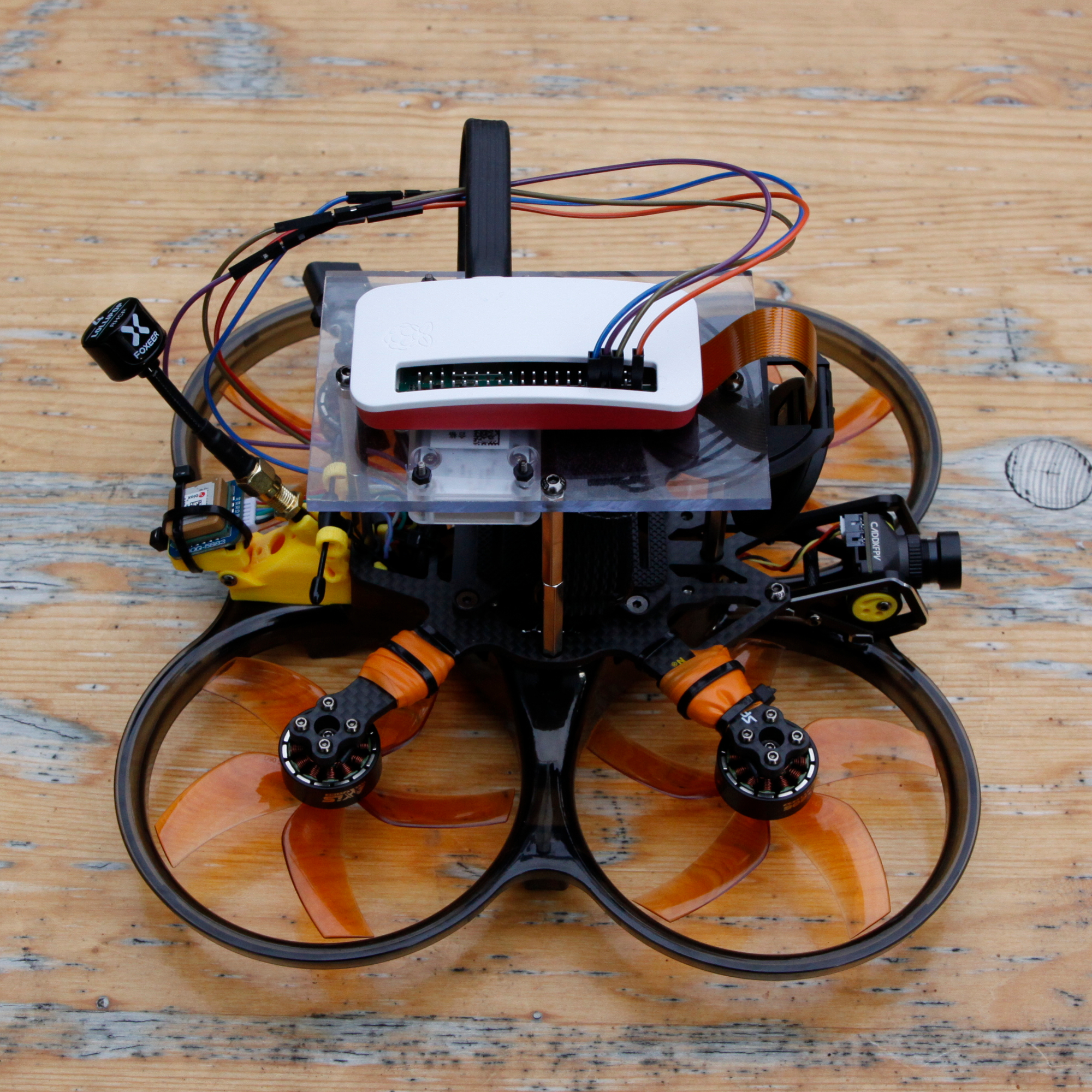
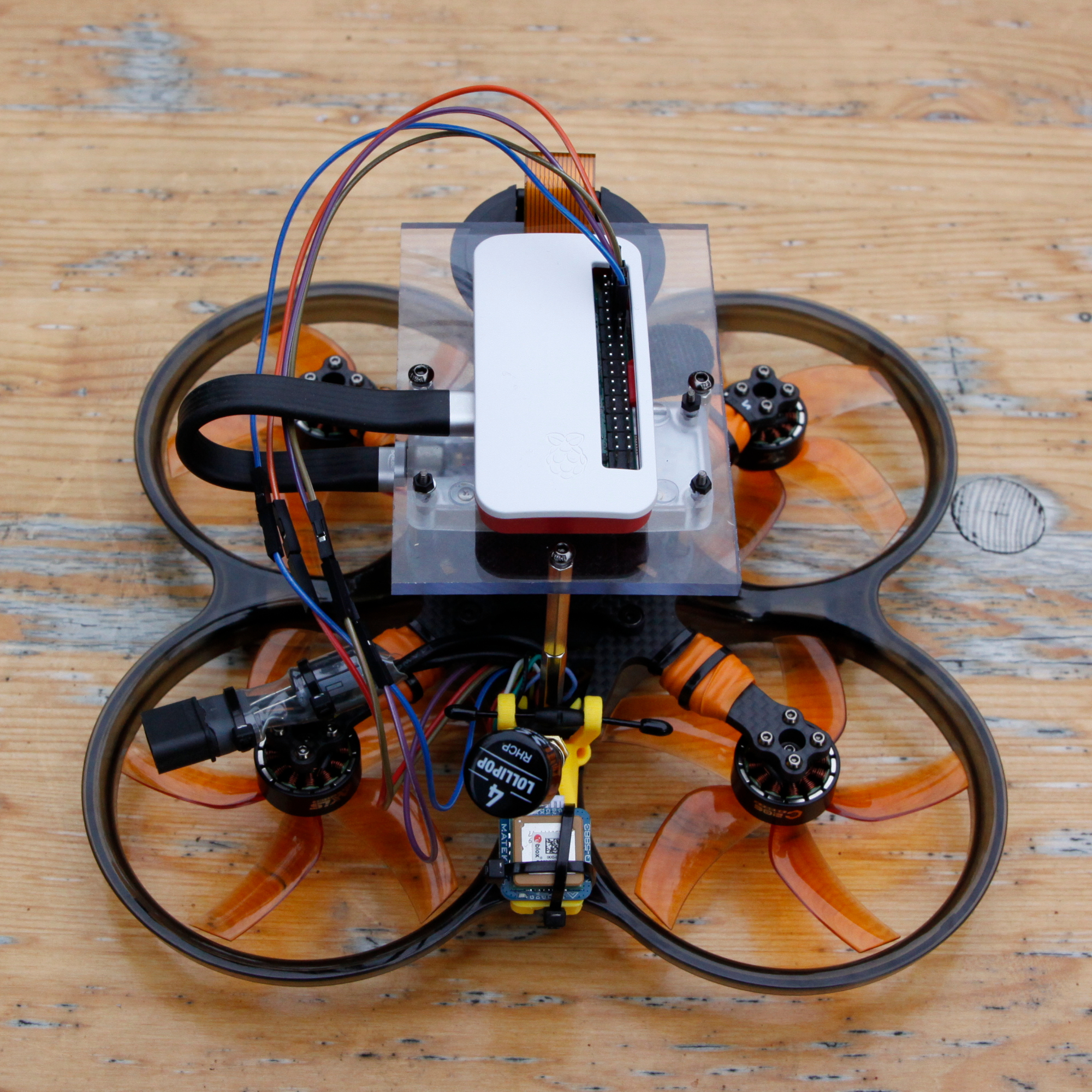
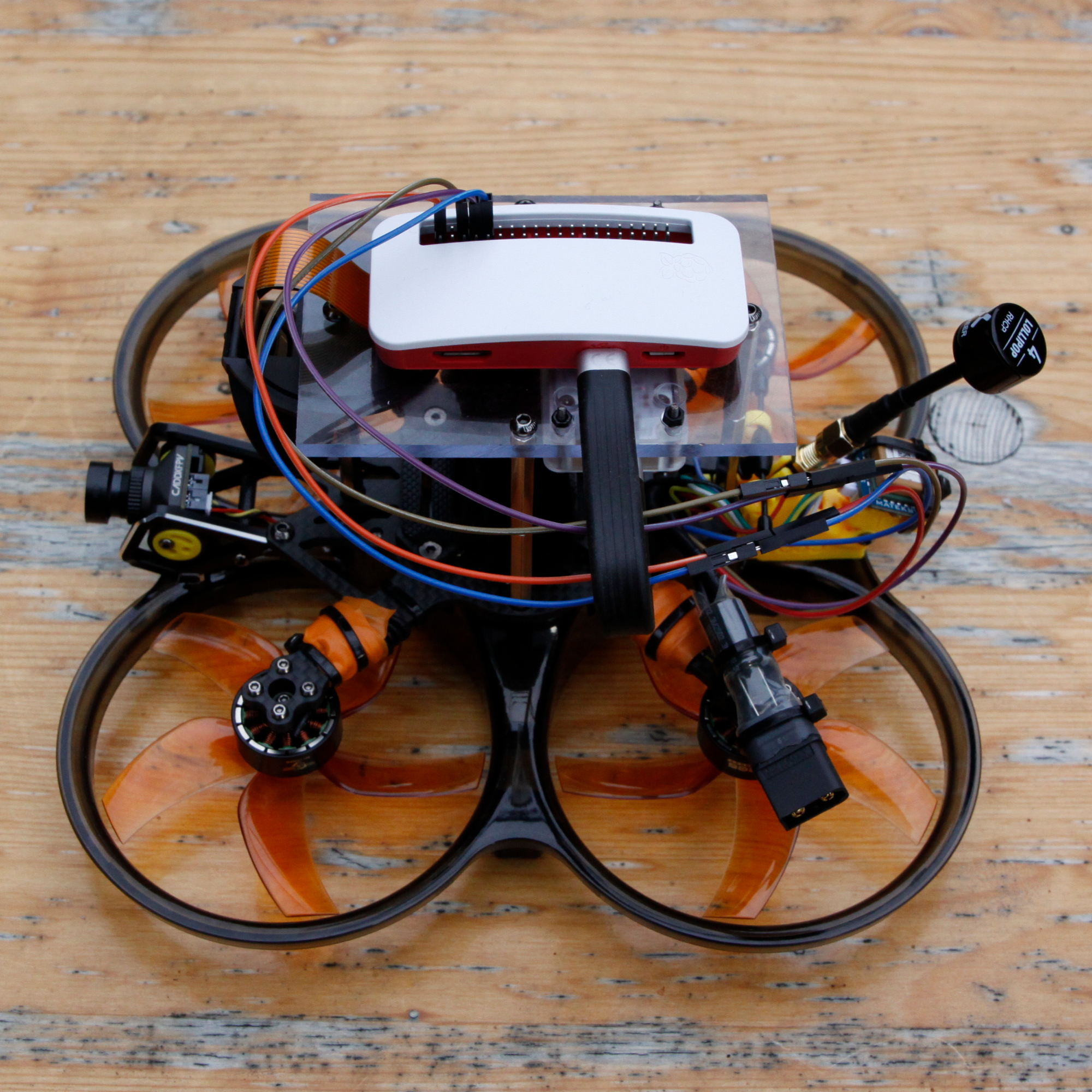
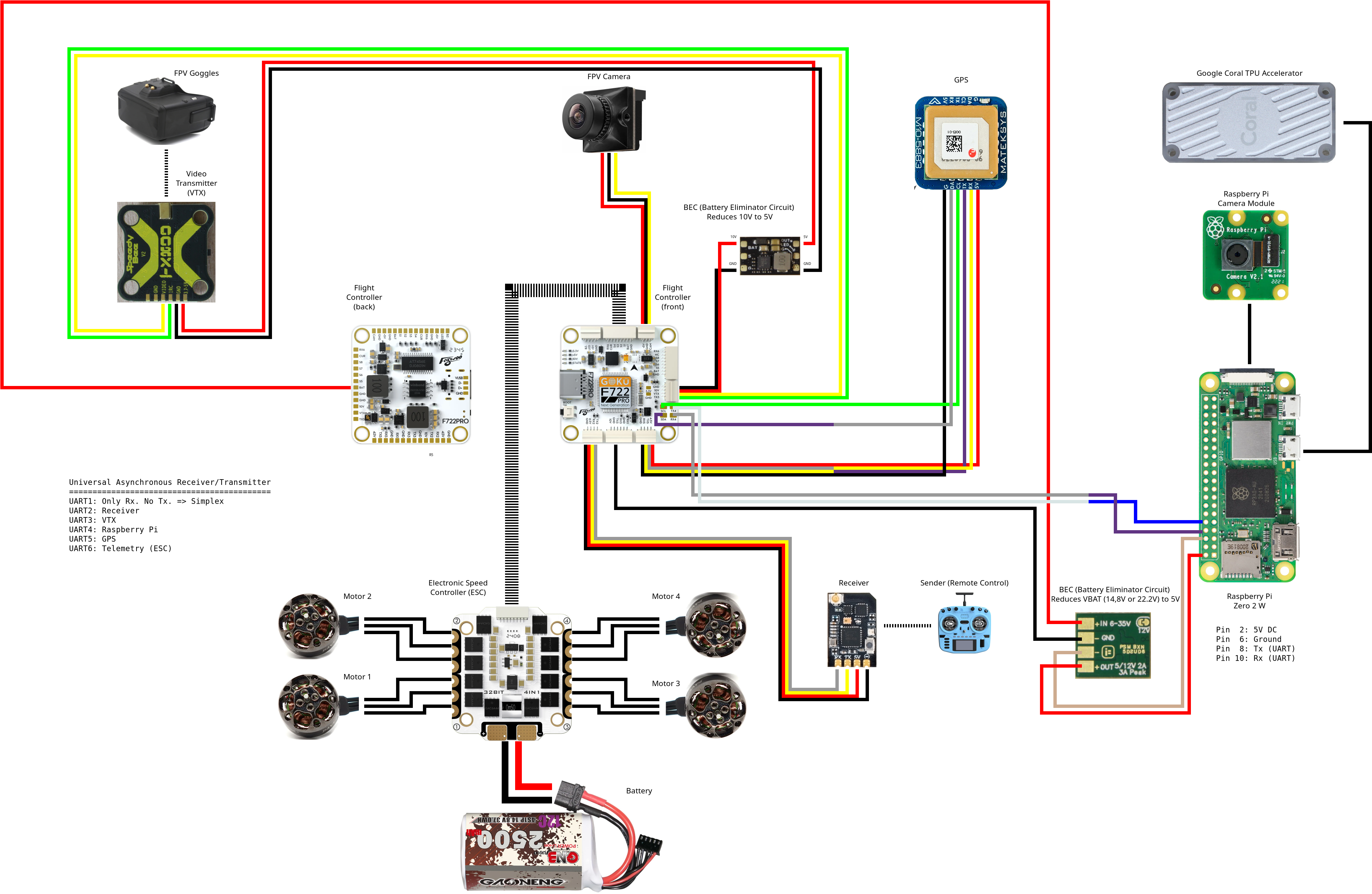
Jedes Team erhält folgende Ausrüstung:
Die vorbereiteten Drohnen sind im Detail...






 |
 |
 |
Zu erreichen bin ich am besten per E-Mail: christianbaun@fb2.fra-uas.de
|
Prof. Dr. Christian Baun Frankfurt University of Applied Sciences (1971-2014: Fachhochschule Frankfurt am Main) FB 2: Informatik und Ingenieurwissenschaften Stand: 26.1.2026 |